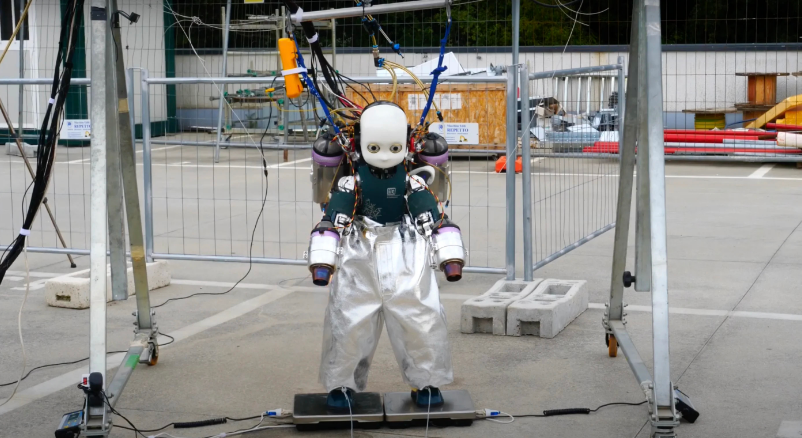
Karena robot terus memperluas operasi mereka keluar dari lingkungan laboratorium penelitian yang terkendali dan ke dalam kekacauan infrastruktur arsitektur dunia nyata, berpindah dari titik A ke titik B telah menjadi tantangan besar — naik tangga, misalnya. Sebagai tanggapan, ahli robotik telah mengembangkan sejumlah solusi, mulai dari memasang rotor sehingga robot dapat melewati rintangan atau, dalam kasus Boston Dynamics, melakukan backflip yang akan membuat Simone Biles berhenti. Dan kemudian ada Daniele Pucci, kepala laboratorium Kecerdasan Buatan dan Mekanik di Institut Teknologi Italia, yang telah mengambil langkah berani dengan memasangkan jetpack yang berfungsi penuh seperti yang dikembangkan Richard Browning di bagian belakang humanoid sintetis iRonCub dengan harapan akhirnya meledakkannya ke langit.
Anda akan mengira kami telah mempelajari pelajaran kami tentang bahaya membangun robot humanoid udara setelah pertama kali kami melalui Age of Ultron, tetapi tim Pucci percaya bahwa sistem seperti itu suatu hari nanti dapat bertindak sebagai penanggap pertama terhadap sekitar 300 bencana alam yang menewaskan sekitar 90.000 orang di seluruh dunia setiap tahun. Kami telah melihat banyak bot tanggap bencana — beberapa humanoid, beberapa tidak begitu banyak — muncul dari laboratorium selama lebih dari satu dekade, seringkali dengan berbagai tingkat keberhasilan.
Robot humanoid memiliki keunggulan dibandingkan bangunan yang lebih esoteris dan UAV tradisional dalam hal respons bencana karena mereka dapat lebih mudah memanipulasi dunia, yang sudah dirancang untuk digunakan manusia. Namun ketika terjadi bencana alam, sebagian besar infrastruktur yang berpusat pada manusia dapat menjadi rusak atau tidak dapat dilewati, yang meniadakan banyak keuntungan awal robot humanoid. Namun dengan menggabungkan desain humanoid dengan kemampuan terbang, tim Pucci dapat memanfaatkan aspek terbaik dari kedua teknologi tersebut.
“Aerial Humanoid Robotics menyatukan manipulasi udara dan robot humanoid. Dengan melakukan itu, robot humanoid udara mengatasi kurangnya penggerak terestrial dari manipulator udara dan memperluas kemampuan penggerak robot humanoid ke kotak penerbangan. Robot humanoid udara kemudian dapat berjalan, terbang, memanipulasi dan objek transportasi, sehingga menawarkan solusi energik efisien untuk transportasi muatan dan manipulasi objek, “tulis tim IIT pada tahun 2019.
“Robot humanoid udara memperluas manipulasi udara ke tingkat yang lebih kuat dan hemat energi. Faktanya, manipulasi udara sering dicontohkan oleh quadrotor yang dilengkapi dengan lengan robot,” kata Pucci kepada IEEE Spectrum. “Robot ini tidak dapat bergerak melalui kekuatan kontak dengan lingkungan, dan mereka sering kesulitan terbang di lingkungan berangin sambil memanipulasi objek, membutuhkan kontrol posisi yang tepat untuk menyelesaikan tugas manipulasi. Jadi tangan ekstra dari robot humanoid terbang bisa membuat titik kontak antara robot dan lingkungan, sehingga membuat kontrol posisi robot lebih sederhana dan lebih kuat.”
“Saya benar-benar percaya bahwa robotika humanoid udara dapat digunakan sebagai test-bed untuk exoskeleton terbang yang digerakkan untuk manusia,” lanjutnya. “Kisah sukses Richard Browning baru-baru ini menunjukkan kelayakan rekayasa dari eksoskeleton yang digerakkan futuristik ini. Namun, perjalanan di depan kita masih panjang, dan kita dapat menggunakan robot humanoid terbang untuk meningkatkan perjalanan ini dan menghindari banyak tes pada manusia.”
Studi terbaru Pucci, Filter Kalman Perpanjangan Berbasis Momentum untuk Estimasi Daya dorong pada Robot Multibody Terbang, dijadwalkan untuk diterbitkan dalam IEEE Robotics and Automation Letters edisi Januari.
Leave a Reply